HOKUYO
YVT 3D Laserowe skanery przestrzeni 3D
YVT 3D Laserowe skanery przestrzeni 3D
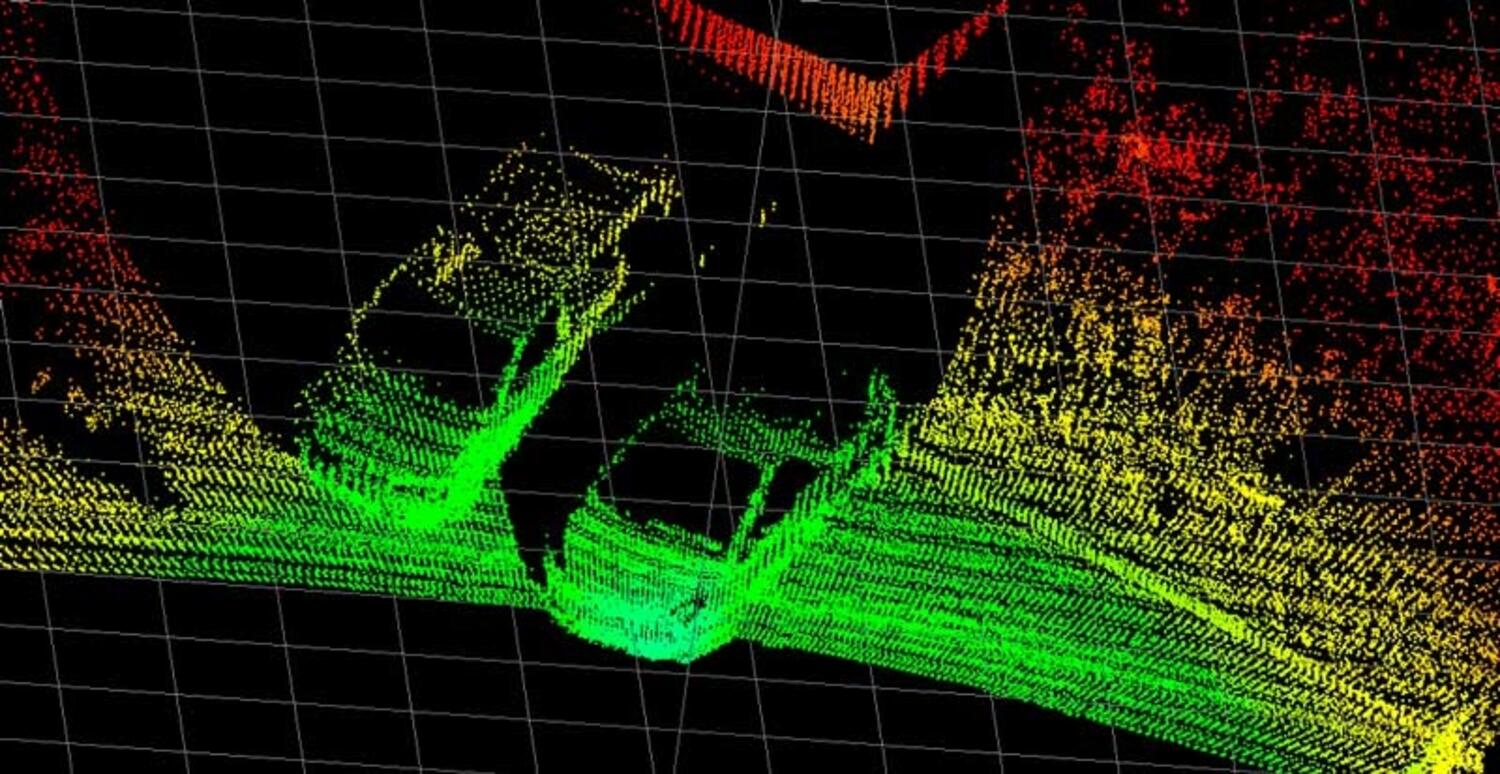
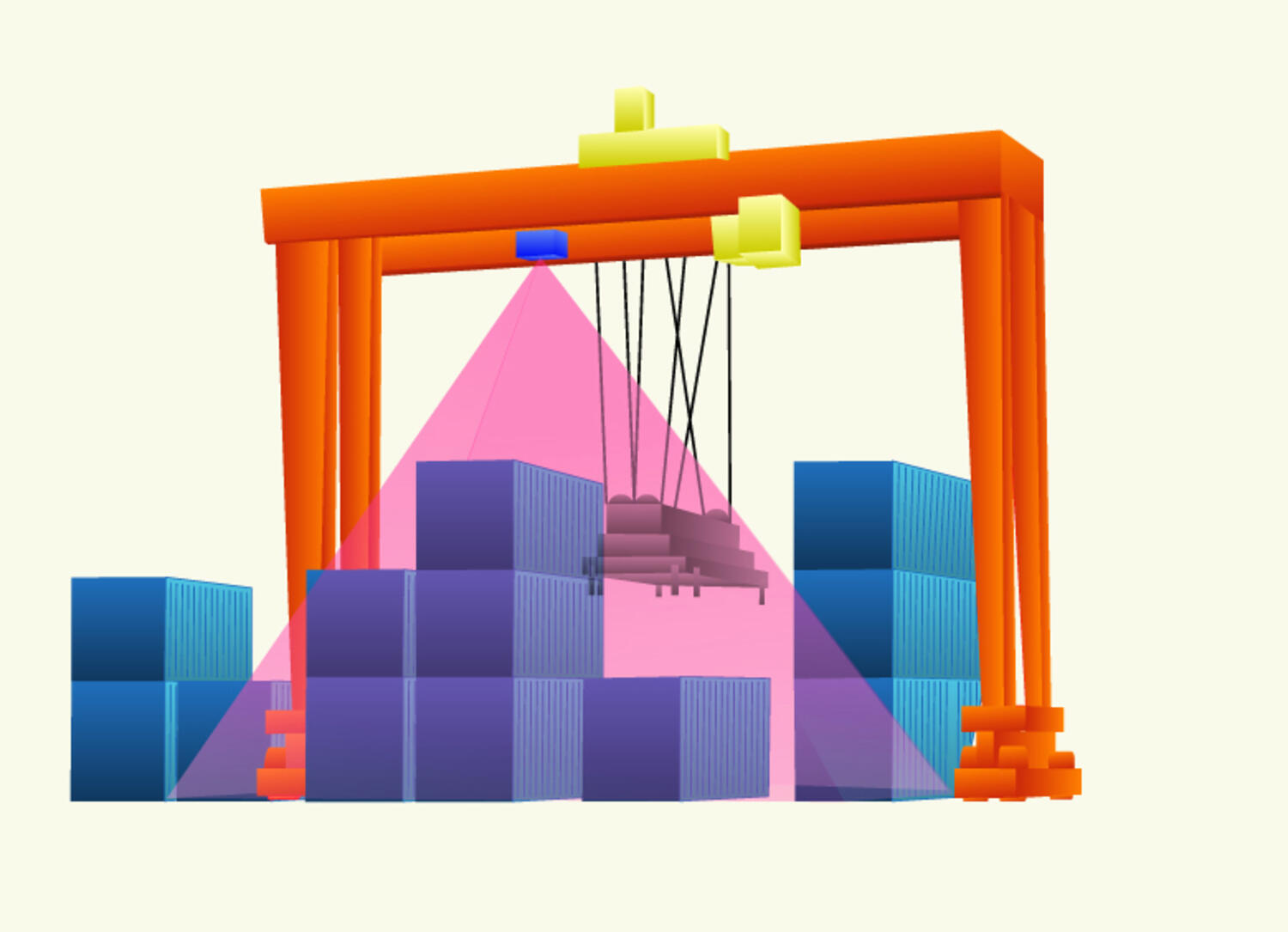
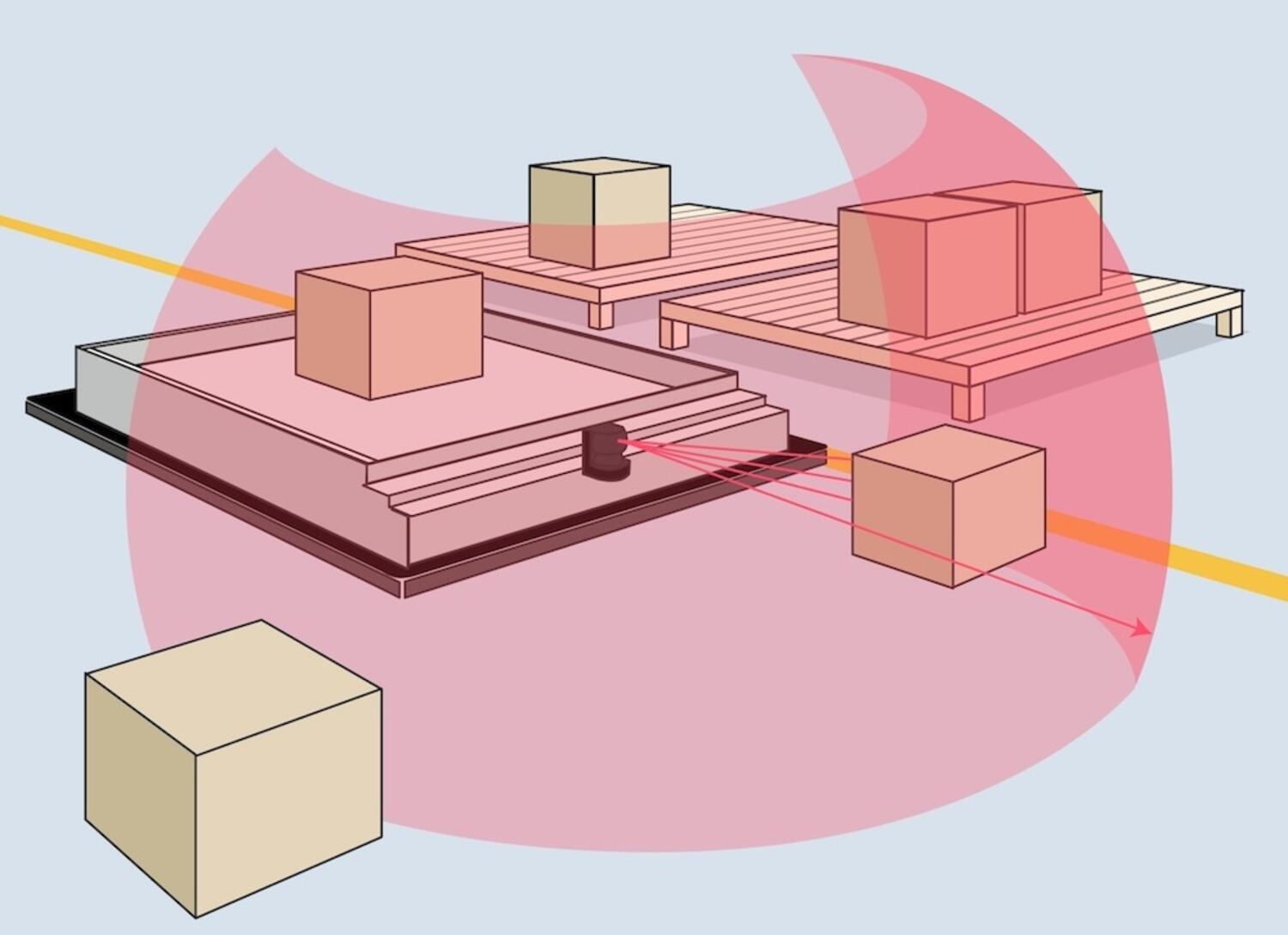
Laserowe skanery przestrzeni 3D służą do niezawodnego rejestrowania obiektów ruchomych i nieruchomych: zarówno w poziomie, jak i w pionie.
Skaner 3D wykorzystuje wiązkę laserową (λ = 905 nm) do skanowania pola półsferycznego. Użytkownik otrzymuje dane z odległościami oraz odpowiadającymi im danymi kątowymi. Odległość do obiektu mierzona jest metodą czasu przelotu światła TOF (Time of Flight). Pomiary są dokonywane z wysoką dokładnością, a zasięg wykrywania jest szerszy niż w przypadku innych metod pomiarowych. Wynosi od 0,3 do 35 m na wprost od skanera oraz od 0,3 do 14 m na boki. Uzyskane wyniki pomiarowe 3D mogą być korygowane przy pomocy danych dotyczących położenia. Pochodzą one z wbudowanego inercyjnego zespołu pomiarowego (IMU), który służy do śledzenia orientacji skanera w dwóch osiach. Posiada on również wejście PPS (Pulse Per Second) oraz wyjście synchronizujące (do synchronizowania urządzeń zewnętrznych). Aby rozpoznawać obiekty z większą precyzją, możliwe jest zwiększenie rozdzielczości do 20 razy w kierunku poziomym i 10 razy w kierunku pionowym, poprzez aktywowanie trybu z przeplotem.
Skaner charakteryzuje się doskonałą odpornością na warunki środowiskowe. Może być używany w ciemności, zarówno w pomieszczeniach, jak i na zewnątrz, i przy natężeniu światła słonecznego do 100 000 lx. Dodatkowo funkcja multi-echo poprawia jego działanie i odporność w złych warunkach pogodowych, umożliwiając odbieranie wielu ech (świateł odbitych od takich „zakłóceń”, jak deszcz, mgła) oraz uzyskanie oddzielnych danych o mierzonej odległości w kierunku multiecho 1. Na podstawie danych o wielu odległościach można wybrać infomacje dotyczące odległości od obiektu docelowego.
Cechy
Odległość pomiarowa: 0,3–35 m na wprost, 0,3–11 m na boki
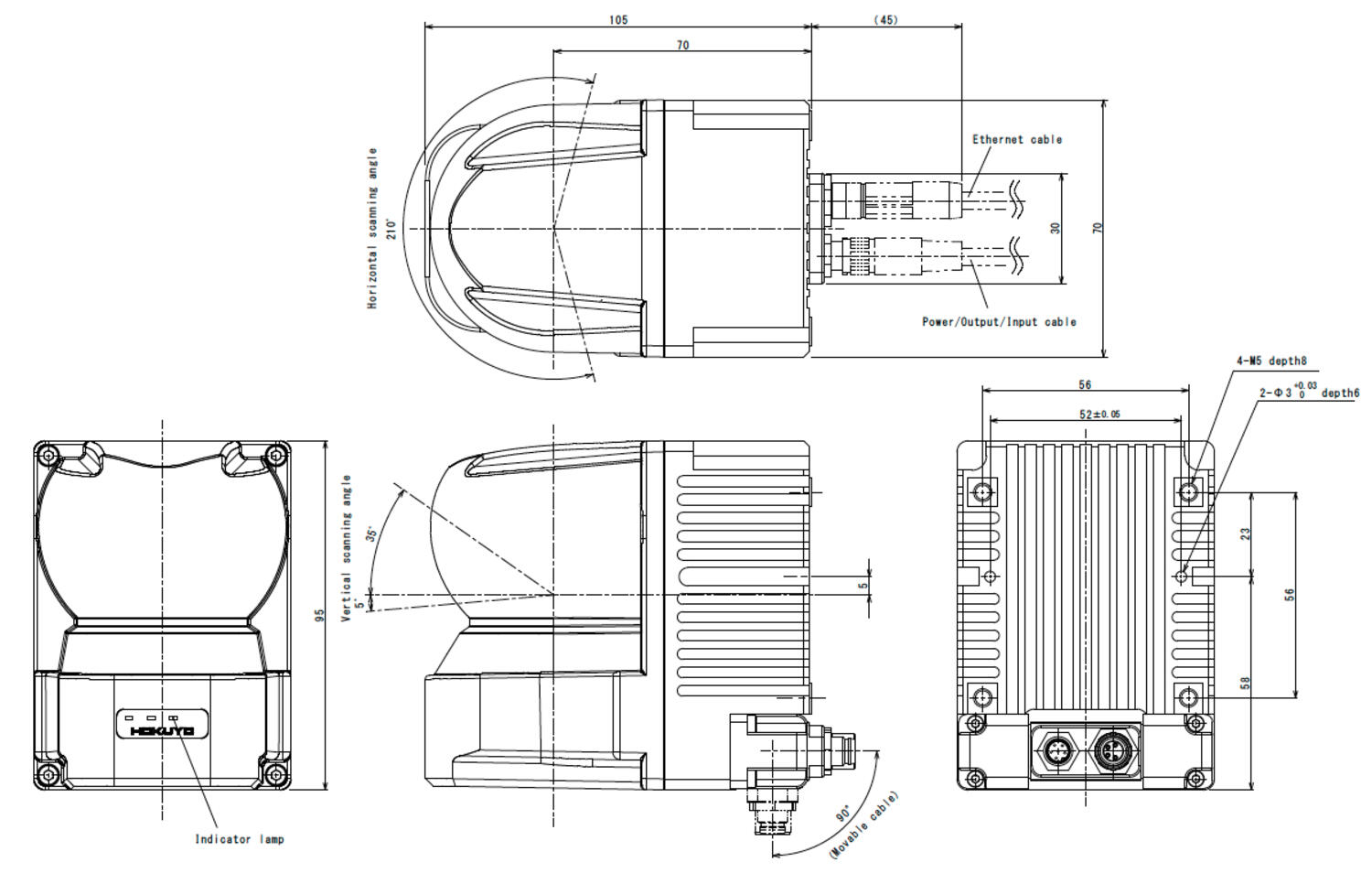
Kąt skanowania w pionie: 40° (–5° ~ +35°)
Kąt skanowania w poziomie: 210°
Dokładność: ±50 mm (biały papier @15 m )
Rozdzielczość: ponad 2 590 punktów (bez przeplotu, 20 fps), ponad 518 000 punktów (przeplot HD mode, 0,1 fps)
Liczba analizowanych ech: maks. 4
Poprawa pomiaru 3D dzięki IMU (jednostka nawigacji inercyjnej)
Interfejs: Ethernet
Wejście: PPS
Wyjście synchronizujące
Odporność na wibracje: 10 G
Natężenie oświetlenia: światło dzienne 100 000 lx
Ochrona: IP67
- Kąt skanowania w poziomie 210°, w pionie 40°
- Odległość pomiarowa 0,3–35 m na wprost, 0,3–11 m na boki
- Interfejs Ethernet
- Poprawa pomiaru 3D dzięki IMU (jednostka nawigacji inercyjnej)


Wybrany wariant produktu
Laserowy skaner przestrzeni 3D, 0.3-35m, Ethernet
Nr produktu:
Wybrany wariant produktu
Specyfikacja techniczna
| Długość | 106 mm |
|---|---|
| Dokładność | 15m: ±50mm |
| Kąt skanowania | 210 ° |
| Klasa lasera | Class 1 |
| Masa | 0,65 kg |
| Max. temperatura pracy | 50 °C |
| Min. temperatura pracy | -10 °C |
| Napięcie zasilania DC max. | 30 V DC |
| Napięcie zasilania DC min. | 10 V DC |
| Odległość skanowania max. | 35 m |
| Pobór pradu | 0,8 A |
|---|---|
| Podłączenie | M8 |
| Protokół komunikacyjny | Ethernet (TCP/IP) 100Base-TX |
| Stopień ochrony IP | IP67 |
| Szerokość | 70 mm |
| Wejście | PPS wejście |
| Wyjście | Wyjście synchronizacji |
| Wysokość | 95 mm |













Opis produktu
Laserowe skanery przestrzeni 3D służą do niezawodnego rejestrowania obiektów ruchomych i nieruchomych: zarówno w poziomie, jak i w pionie.
Skaner 3D wykorzystuje wiązkę laserową (λ = 905 nm) do skanowania pola półsferycznego. Użytkownik otrzymuje dane z odległościami oraz odpowiadającymi im danymi kątowymi. Odległość do obiektu mierzona jest metodą czasu przelotu światła TOF (Time of Flight). Pomiary są dokonywane z wysoką dokładnością, a zasięg wykrywania jest szerszy niż w przypadku innych metod pomiarowych. Wynosi od 0,3 do 35 m na wprost od skanera oraz od 0,3 do 14 m na boki. Uzyskane wyniki pomiarowe 3D mogą być korygowane przy pomocy danych dotyczących położenia. Pochodzą one z wbudowanego inercyjnego zespołu pomiarowego (IMU), który służy do śledzenia orientacji skanera w dwóch osiach. Posiada on również wejście PPS (Pulse Per Second) oraz wyjście synchronizujące (do synchronizowania urządzeń zewnętrznych). Aby rozpoznawać obiekty z większą precyzją, możliwe jest zwiększenie rozdzielczości do 20 razy w kierunku poziomym i 10 razy w kierunku pionowym, poprzez aktywowanie trybu z przeplotem.
Skaner charakteryzuje się doskonałą odpornością na warunki środowiskowe. Może być używany w ciemności, zarówno w pomieszczeniach, jak i na zewnątrz, i przy natężeniu światła słonecznego do 100 000 lx. Dodatkowo funkcja multi-echo poprawia jego działanie i odporność w złych warunkach pogodowych, umożliwiając odbieranie wielu ech (świateł odbitych od takich „zakłóceń”, jak deszcz, mgła) oraz uzyskanie oddzielnych danych o mierzonej odległości w kierunku multiecho 1. Na podstawie danych o wielu odległościach można wybrać infomacje dotyczące odległości od obiektu docelowego.
Cechy
Odległość pomiarowa: 0,3–35 m na wprost, 0,3–11 m na boki
Kąt skanowania w pionie: 40° (–5° ~ +35°)
Kąt skanowania w poziomie: 210°
Dokładność: ±50 mm (biały papier @15 m )
Rozdzielczość: ponad 2 590 punktów (bez przeplotu, 20 fps), ponad 518 000 punktów (przeplot HD mode, 0,1 fps)
Liczba analizowanych ech: maks. 4
Poprawa pomiaru 3D dzięki IMU (jednostka nawigacji inercyjnej)
Interfejs: Ethernet
Wejście: PPS
Wyjście synchronizujące
Odporność na wibracje: 10 G
Natężenie oświetlenia: światło dzienne 100 000 lx
Ochrona: IP67
Powiązane

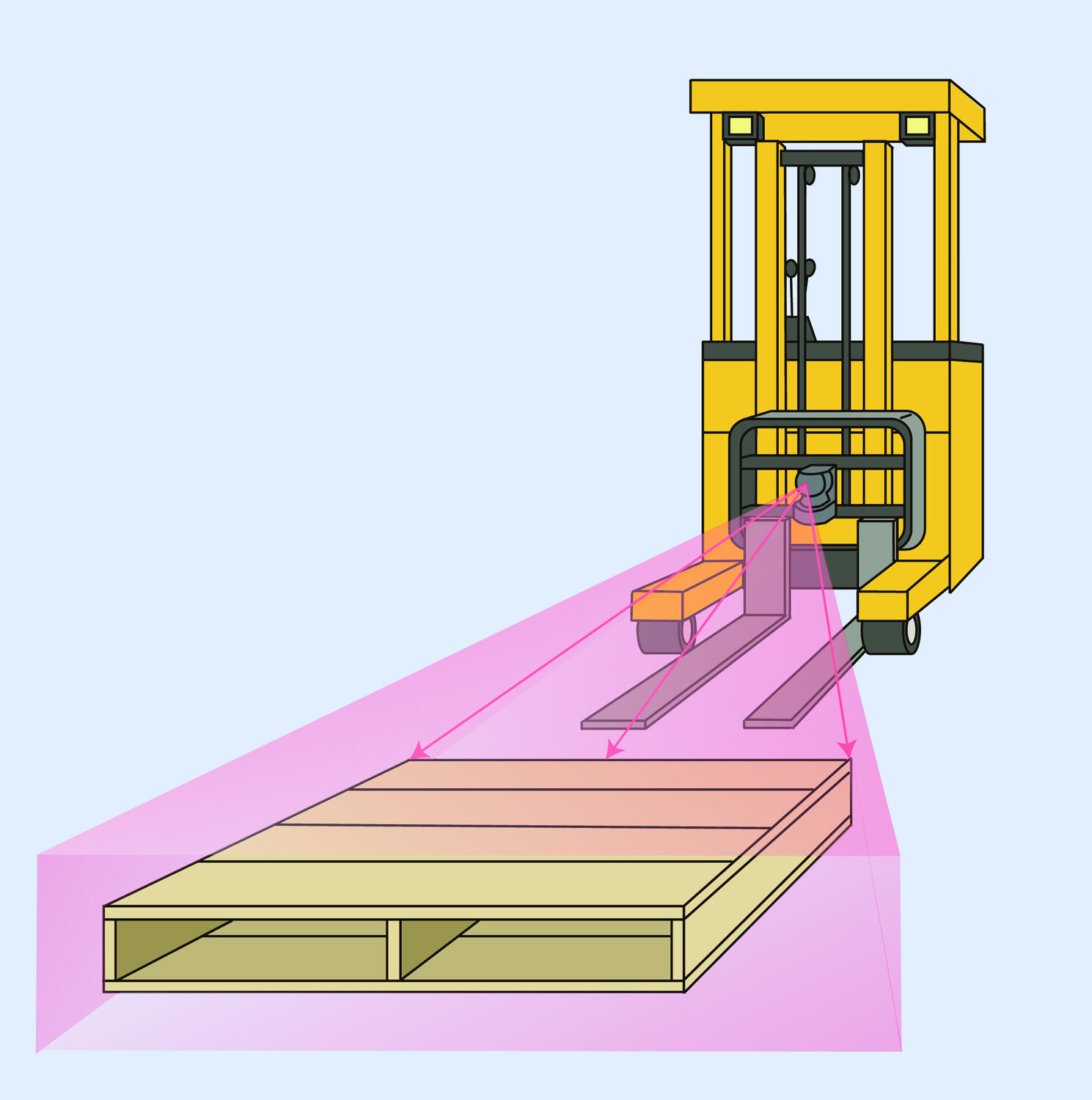
Czujnik laserowy do precyzyjnego wykrywania otworów transportowych w paletach – LiDAR-UCT-10LCM
Prawidłowe pozycjonowanie wideł względem palety w sposób szybki, dokładny i bezpieczny, to podstawowy wymóg dla wózków widłowych i systemów AGV.

S3N firmy Datasensing – miniaturowy czujnik fotoelektryczny o maksymalnej wydajności
Rodzina czujników S3N, produkowana przez firmę Datasensing, oferuje kompletne i elastyczne rozwiązanie w wyjątkowo kompaktowej i wytrzymałej obudowie.

Dlaczego warto zmienić przełączniki rtęciowe na czujniki DIS
Przełączniki rtęciowe są od wielu lat stosowane w przemyśle. Jednak ze względu na powszechnie rosnącą świadomość zagrożeń, jakie niesie rtęć dla środowiska i zdrowia, konieczne stało się zastąpienie ich bezpieczniejszymi alternatywami, takimi jak czujniki DIS.

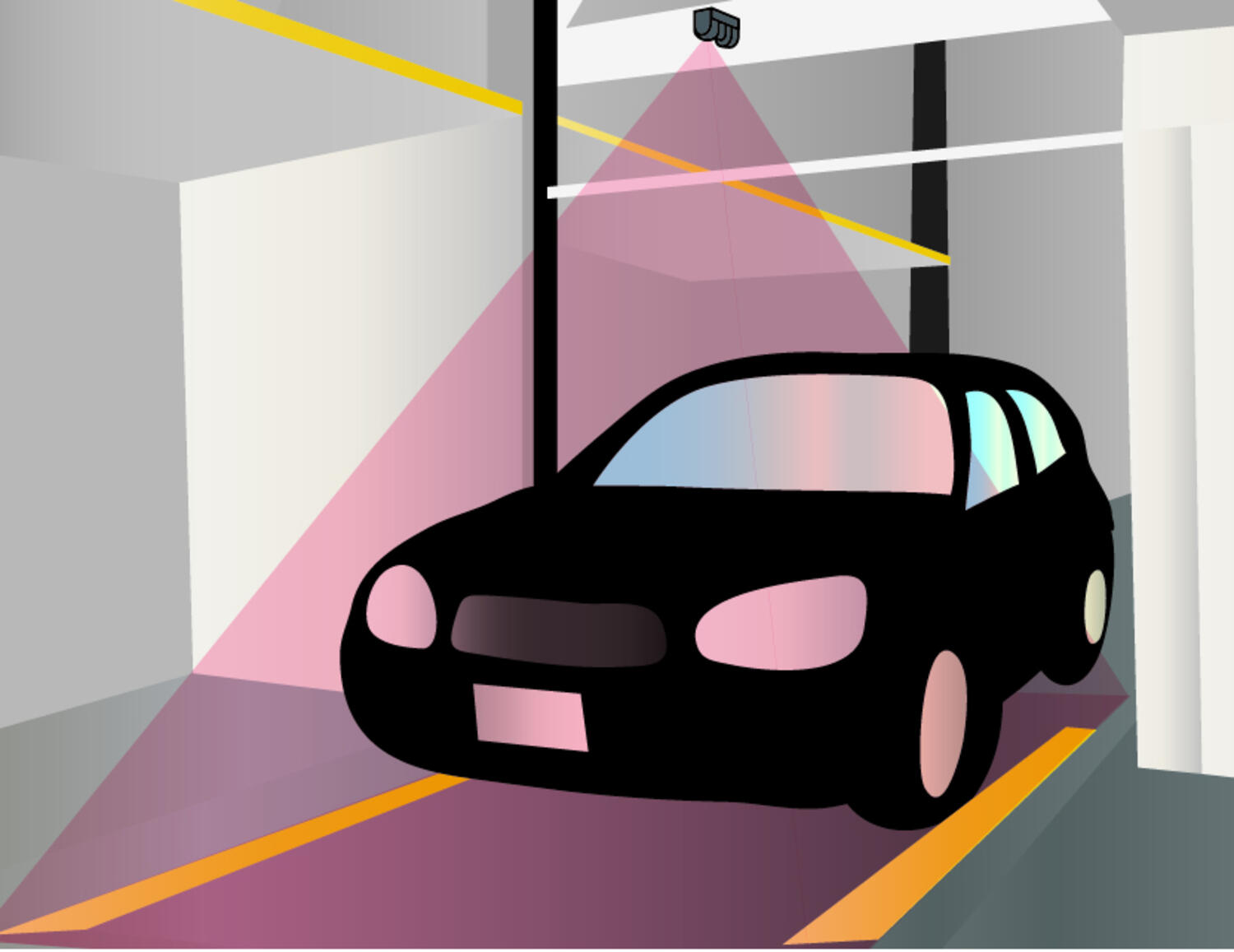
Dalmierze laserowe Dimetix – przykładowe zastosowania w intralogistyce
Dalmierze laserowe Dimetix oferują liczne korzyści w intralogistyce, przyczyniając się do wydajnego, kontrolowanego i bezpiecznego przepływu materiałów oraz zarządzania przestrzenią magazynową.

WYŁĄCZNIKI KRAŃCOWE FIRMY BERNSTEIN DO MAŁYCH PRĄDÓW I TRUDNYCH WARUNKÓW PRACY
Wyłączniki krańcowe IN73 i MN78 firmy Bernstein idealnie nadają się do małych prądów.

Zabezpieczenie termiczne transformatora
Zabezpieczenie termiczne transformatora typu ZTT marki INOVA służy do kontroli jego temperatury za pomocą czujników PT100 umieszczonych w uzwojeniach i na rdzeniu.

