ELECTROMEN
EM-243C
Sterownik szczotkowych silników DC
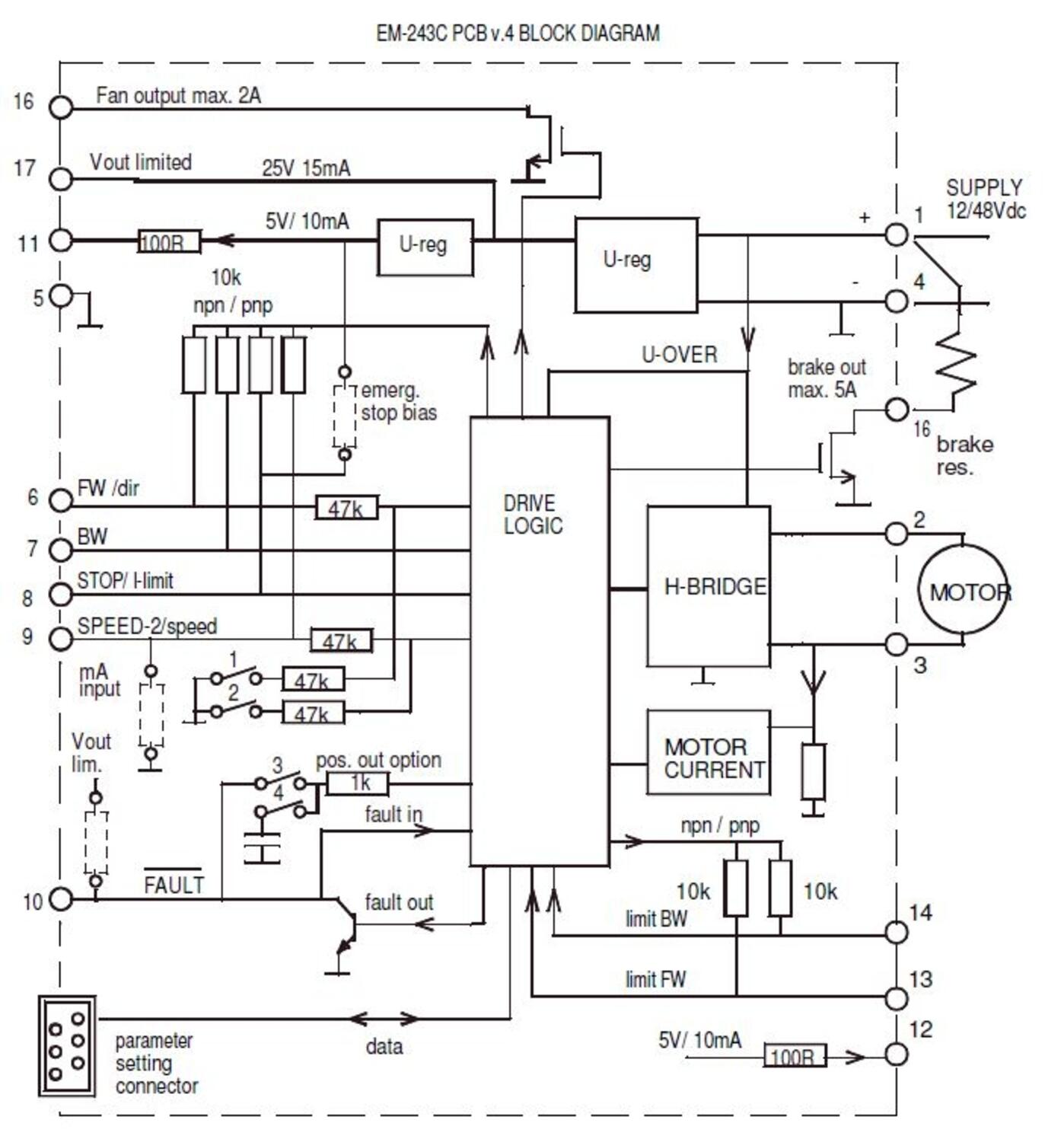
EM-243C to sterownik oparty o pełen mostek H. Jest przeznaczony do pracy z silnikiem prądu stałego w zastosowaniach, w których potrzebne są pewne funkcje specjalne. Sterownik posiada regulowane rampy przyspieszania i zwalniania, które umożliwiają płynne uruchamianie i zatrzymywanie. Regulowany limit prądu chroni silnik przed przeciążeniem i może być również używany jako wyłącznik krańcowy. To urządzenie posiada również dwie ustawialne prędkości, które są przydatne w aplikacjach pozycjonowania. Wejścia sterujące FW i BW uruchamiają bieg do przodu i do tyłu. STOP służy do wyłączania silnika, ale dostępne są również indywidualne wejścia krańcowe dla kierunków FW i BW. Wejście SPEED-2 aktywuje zaprogramowaną prędkość 2, ale może być również użyte jako wejście dla analogowego sygnału sterującego prędkością 0-5V. Zacisk FAULT ma jednocześnie funkcję wejścia i wyjścia, pin jest normalnie wysoki, ale jest obniżany w przypadku przegrzania lub przekroczenia prądu. Jeśli sygnał FAULTzostanie podany z zewnątrz, spowoduje to zatrzymanie i uniemożliwi ponowne uruchomienie. Na przykład możliwe jest połączenie ze sobą styków błędów kilku jednostek i osiągnięcie synchronicznego zatrzymania. Dostępne są 2 tryby sterowania, ciągły i impulsowy. W trybie ciągłym silnik pracuje tak długo, jak długo sterowanie jest aktywne. W trybie impulsowym krótkie polecenie uruchamia silnik i dopiero nowy impuls zmieni stan. Karta posiada wybieralne logiki wejściowe. Wejścia są podzielone na dwie grupy, kontrolne i limitujące. Grupy mogą być indywidualnie ustawiane dla logiki NPN lub PNP. Parametry są ustawiane za pomocą interfejsu EM-236. Działanie sterownika i niektóre jego wartości funkcjonalne można również monitorować za pomocą interfejsu EM-236. W programie w wersji C można wybrać częstotliwość PWM 16kHz.
- 12-48 V DC, 50 A prąd ciągły, 100 A prąd szczytowy
- Prędkość, kierunek, ograniczenie prądu, łagodny start/stop
- Wejścia cyfrowe dla wyłączników krańowych
- Możliwość podłączenia rezystora hamowania
- Kompaktowa budowa, montaż na szynie DIN


Wybrany wariant produktu
Sterownik silnika DC, 4Q, 12-48V DC, 50A
Nr produktu:

Wybrany wariant produktu
Specyfikacja techniczna
| 2053_Current limit (A) | 1-100 |
|---|---|
| 2421_Peak current (A) | (5s) *100 |
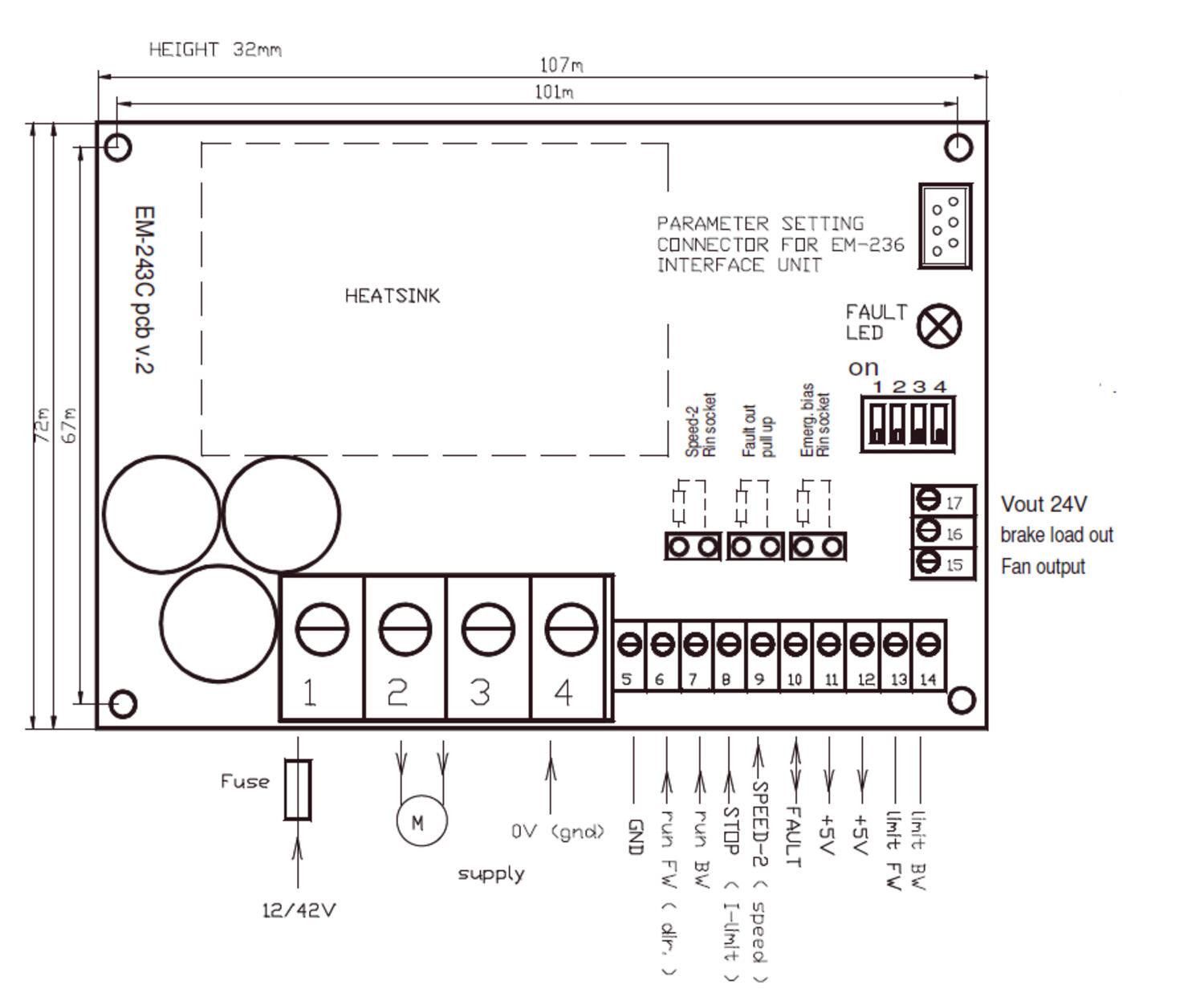
| 5646_Dimensions length x width x height (mm) | 107x72x40 mm |
| Brake output | Tak |
| Change direction of rotation (CW/CCW) | Tak |
| Current limit adjustable | Tak |
| Currenttrip autoreveice | Tak |
| Częstotliwość PWM | 2kHz/16kHz |
| Dostawca | Electromen |
| Impulse/continuous mode | Tak |
| Joystick analog input | Tak |
| Maksymalny prąd ciągły | *50 A |
| Masa | 190 g |
| Montaż | szyna DIN |
| Napięcie zasilania | 12-48 V DC |
| Odpowiedni silnik | Szczotkowy DC |
| Parallel driver four motors | Nie |
| Parallel driver two motors | Nie |
|---|---|
| Position with potentiometer | Nie |
| Positioning | Nie |
| Potentiometer adjustable speed | Tak |
| Rodzaj sterowania | Prędkość, Kierunek, Moment, Soft start/stop |
| RS232 | Nie |
| RS485/Modbus | Nie |
| Softstart/stop | Tak |
| Speed settings | Tak |
| Speedregulator | Tak |
| Stop at limit position | Tak |
| Sygnał niski - logiczne 0 | <1V = OFF |
| Sygnał wysoki - logiczne 1 | >4V = ON |
| Temperatura pracy | -40°C...+60°C |
| Wejście analogowe | 0-5V lub 0-10V |
| Zakres ustawień prądu | 1-100 A |




Opis produktu
EM-243C to sterownik oparty o pełen mostek H. Jest przeznaczony do pracy z silnikiem prądu stałego w zastosowaniach, w których potrzebne są pewne funkcje specjalne. Sterownik posiada regulowane rampy przyspieszania i zwalniania, które umożliwiają płynne uruchamianie i zatrzymywanie. Regulowany limit prądu chroni silnik przed przeciążeniem i może być również używany jako wyłącznik krańcowy. To urządzenie posiada również dwie ustawialne prędkości, które są przydatne w aplikacjach pozycjonowania. Wejścia sterujące FW i BW uruchamiają bieg do przodu i do tyłu. STOP służy do wyłączania silnika, ale dostępne są również indywidualne wejścia krańcowe dla kierunków FW i BW. Wejście SPEED-2 aktywuje zaprogramowaną prędkość 2, ale może być również użyte jako wejście dla analogowego sygnału sterującego prędkością 0-5V. Zacisk FAULT ma jednocześnie funkcję wejścia i wyjścia, pin jest normalnie wysoki, ale jest obniżany w przypadku przegrzania lub przekroczenia prądu. Jeśli sygnał FAULTzostanie podany z zewnątrz, spowoduje to zatrzymanie i uniemożliwi ponowne uruchomienie. Na przykład możliwe jest połączenie ze sobą styków błędów kilku jednostek i osiągnięcie synchronicznego zatrzymania. Dostępne są 2 tryby sterowania, ciągły i impulsowy. W trybie ciągłym silnik pracuje tak długo, jak długo sterowanie jest aktywne. W trybie impulsowym krótkie polecenie uruchamia silnik i dopiero nowy impuls zmieni stan. Karta posiada wybieralne logiki wejściowe. Wejścia są podzielone na dwie grupy, kontrolne i limitujące. Grupy mogą być indywidualnie ustawiane dla logiki NPN lub PNP. Parametry są ustawiane za pomocą interfejsu EM-236. Działanie sterownika i niektóre jego wartości funkcjonalne można również monitorować za pomocą interfejsu EM-236. W programie w wersji C można wybrać częstotliwość PWM 16kHz.
Add product as a new cart row
You already added this product. Choose whether to increase quantity on the existing row or add the product as a new row.
Powiązane

Micro4804 – inteligentne sterowanie ruchem w kompaktowej formie
Micro4804 – niezwykle kompaktowe, ale jednocześnie wydajne sterowniki zaprojektowane z myślą o aplikacjach wymagających precyzji, synchronizacji i dużej dynamiki.
Technosoft Motion Control – sterowniki IPOS oferują większą moc i wydajność
Firma Technosoft specjalizuje się w opracowywaniu inteligentnych napędów, łączących w sobie sterownik silnika i kontroler ruchu w jednym urządzeniu, w celu realizacji złożonych funkcji ruchu.

Kontroler ruchu IGVD71 – idealny do aplikacji mobilnych
Pojazdy AGV wymagają wyspecjalizowanych kontrolerów ruchu, niezawodnych i dających duże możliwości programowania. Taki właśnie jest iGVD71 firmy Technosoft.

Nowoczesne technologie podawania i sortowania części
Współczesna produkcja wymaga coraz większej precyzji, elastyczności i wydajności. Odpowiedzią na te potrzeby są zaawansowane systemy podawania, sortowania i obsługi części od firmy Afag.

Konwertery DC/DC dla kolejnictwa
Działająca w ramach grupy Fortec firma Autronic – specjalizująca się w produkcji niezawodnych konwerterów DC/DC do zastosowań kolejowych i przemysłowych – prezentuje cztery nowe modele spełniające wymagające normy EN 50155 oraz EN 50121-3-2.

Jak prawidłowo wybrać przemysłowy czytnik kodów kreskowych? Przewodnik dla produkcji i logistyki
W poradniku wyjaśniamy, na co zwrócić uwagę podczas wyboru czytnika kodów oraz jakie rozwiązania sprawdzają się w różnych aplikacjach przemysłowych.

